Leveraging internal viscous flow to extend the capabilities of beam-shaped soft-robotic actuators
Matia, Y., Elimelech, T. & Gat A.D. (2017)
Soft Robotics 4(2), 126-134 (pdf, Journal page)
| Elastic deformation of beam-shaped structures due to embedded fluidic networks (EFNs) is mainly studied in the context of soft actuators and soft robotic applications. Currently, the effects of viscosity are not examined in such configurations. In this work, we introduce an internal viscous flow and present the extended range of actuation modes enabled by viscosity. We analyze the interaction between elastic deflection of a slender beam and viscous flow in a long serpentine channel embedded within the beam. The embedded network is positioned asymmetrically with regard to the neutral plane and thus pressure within the channel creates a local moment deforming the beam. Under assumptions of creeping flow and small deflections, we obtain a fourth-order integro-differential equation governing the time-dependent deflection field. This relation enables the design of complex time-varying deformation patterns of beams with EFNs. Leveraging viscosity allows to extend the capabilities of beam-shaped actuators such as the creation of inertia-like standing and moving wave solutions in configurations with negligible inertia and limiting deformation to a small section of the actuator. The results are illustrated experimentally. | . |
Dynamics of elastic beams with embedded fluid-filled parallel-channel networks
Matia Y. & Gat A.D. (2015)
Soft Robotics 2(1), 42-47 (pdf, Journal page)
| A pressurized fluid-filled parallel-channel network embedded in an elastic beam, asymmetrically to the neutral plane, will create a deformation field within the beam. Deformation due to embedded fluidic networks is currently studied in the context of soft actuators and soft-robotic applications. Expanding on this concept, configurations can be designed so that the pressure in the channel network is created directly from external forces acting on the beam, and thus can be viewed as passive solid–fluid composite structures. We approximate the deformation of such structures and relate the fluid pressure and geometry of the network to a continuous deformation-field function. This enables the design of networks creating steady arbitrary deformation fields as well as to eliminate deformation created by external time-varying forces, thus increasing the effective rigidity of the beam. In addition, by including the effects of the deformation created by the channel network on the beam inertia, we can modify the response of the beam to external time-varying forces. We present a scheme to design channel networks that create predefined oscillating deformation patterns in response to external oscillating forces. The ability to include inertial effects is relevant to the design of dynamic soft robots and soft actuators. Our results are illustrated and validated by numerical computations. | .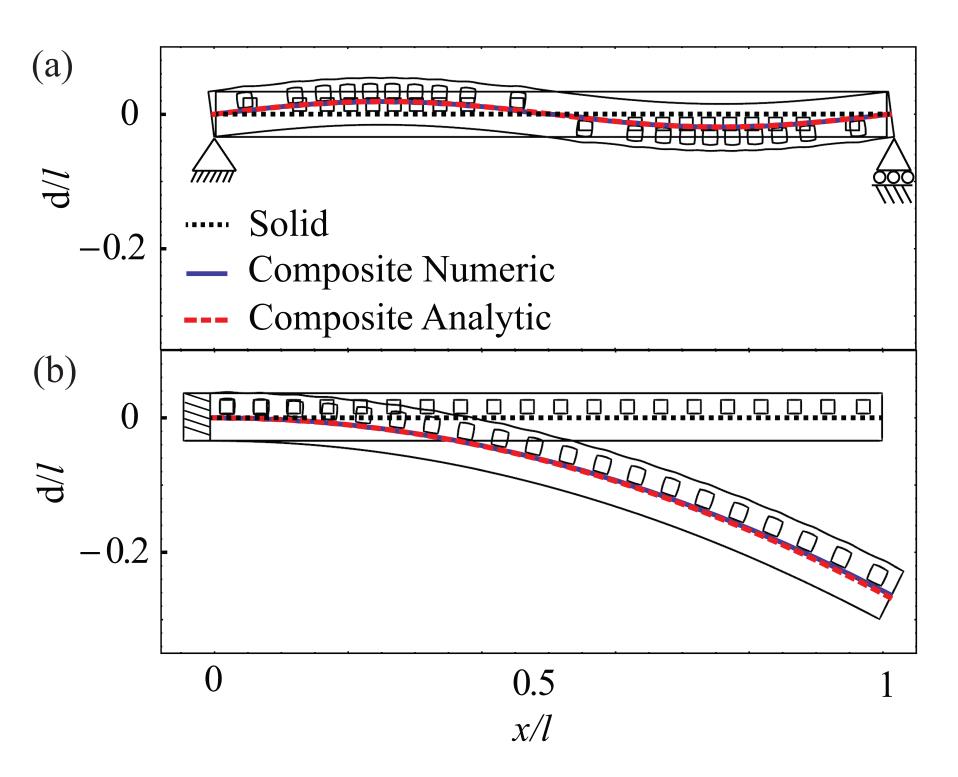 |
Viscous Liquid within a Closed Elastic Cylinder Subject to External Forces with Application to Soft-Robotics
Elbaz S.B. & Gat A.D. (2014)
J. Fluid Mech. 758, 221-237 (pdf, Journal page, Presentation)
| Viscous flows in contact with elastic structures apply both pressure and shear stress at the solid-liquid interface and thus create internal stress- and deformation-fields within the solid structure. We study the interaction between the deformation of elastic structures, subject to external forces, and internal viscous liquid. We neglect inertia in the liquid and solid and focus on viscous flow through a thin-walled slender elastic cylindrical shell as a basic model of a soft-robot. Our analysis yields an inhomogeneous linear diffusion equation governing the coupled viscous-elastic system. Solutions for the flow and deformation fields are obtained in closed analytical form. The functionality of the viscous-elastic diffusion process is explored within the context of soft-robotic applications, through analysis of selected solutions to the governing equation. Shell material compressibility is shown to have a unique effect in inducing different flow and deformation regimes. This research may prove valuable to applications such as micro-swimmers, micro autonomous systems and soft-robotics by allowing for the design and control of complex time-varying deformation fields. | .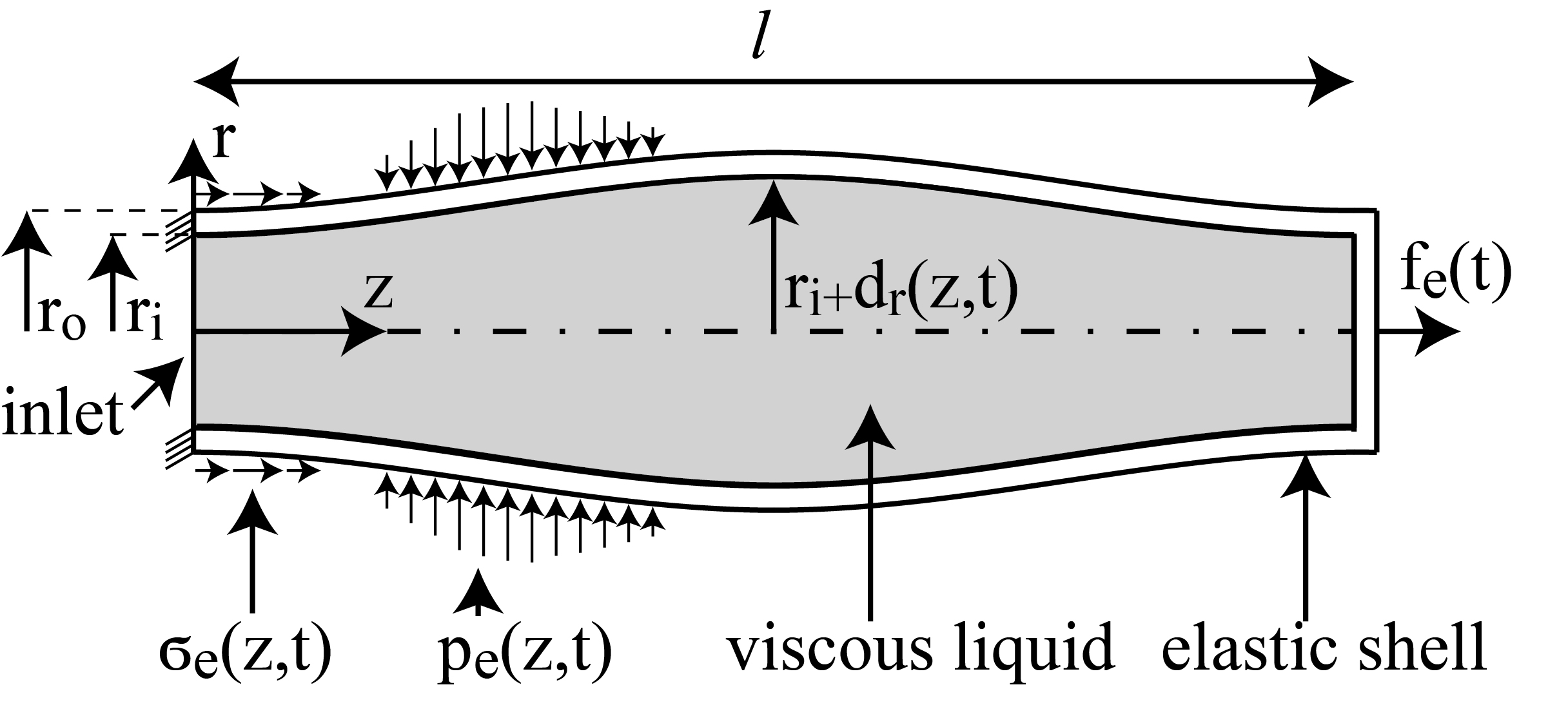 |