Underactuated fluidic control of a continuous multistable membrane
Peretz O., Mishra A.K., Shepherd R.K. & Gat A.D. (2020)
Proceedings of the National Academy of Sciences 117 (10), 5217-5221 (Main_pdf, SI_pdf, Link to Journal)
| This work addresses the challenge of underactuated pattern generation in continuous multistable structures. The examined configuration is a slender membrane that can concurrently sustain two different equilibria states, separated by transition regions, and is actuated by a viscous fluid. We first demonstrate the formation and motion of a single transition region and then sequencing of several such moving transition regions to achieve arbitrary patterns by controlling the inlet pressure of the actuating fluid. Finally, we show that nonuniform membrane properties, along with transient dynamics of the fluid, can be leveraged to directly snap-through any segment of the membrane. |
| . |
Single-Input Control of Multiple Fluid-Driven Elastic Actuators Via Interaction Between Bi-Stability and Viscosity
Ben-Haim, E., Salem, L., Or, Y. & Gat A. D. (2019)
Soft Robotics (ahead of print), (pdf, Link to Journal)
| A leading concept in soft robotics actuation, as well as in microfluidics applications such as valves in lab-on-a-chip devices, is applying pressurized flow in cavities embedded within elastic bodies. Generating complex deformation patterns typically requires control of several inputs, which greatly complicates the system’s operation. In this study, we present a novel method for single-input control of a serial chain of bistable elastic chambers connected by thin tubes. Controlling a single flow rate at the chain’s inlet, we induce an irreversible sequence of transitions that can reach any desired state combination of all bistable elements. Mathematical formulation and analysis of the system’s dynamics reveal that these transitions are enabled, thanks to bistability combined with pressure lag induced by viscous resistance. The results are demonstrated through numerical simulations combined with experiments for chains of up to five chambers, using water-diluted glycerol as the injected fluid. The proposed technique has a promising potential for development of sophisticated soft actuators with minimalistic control. |
| . |
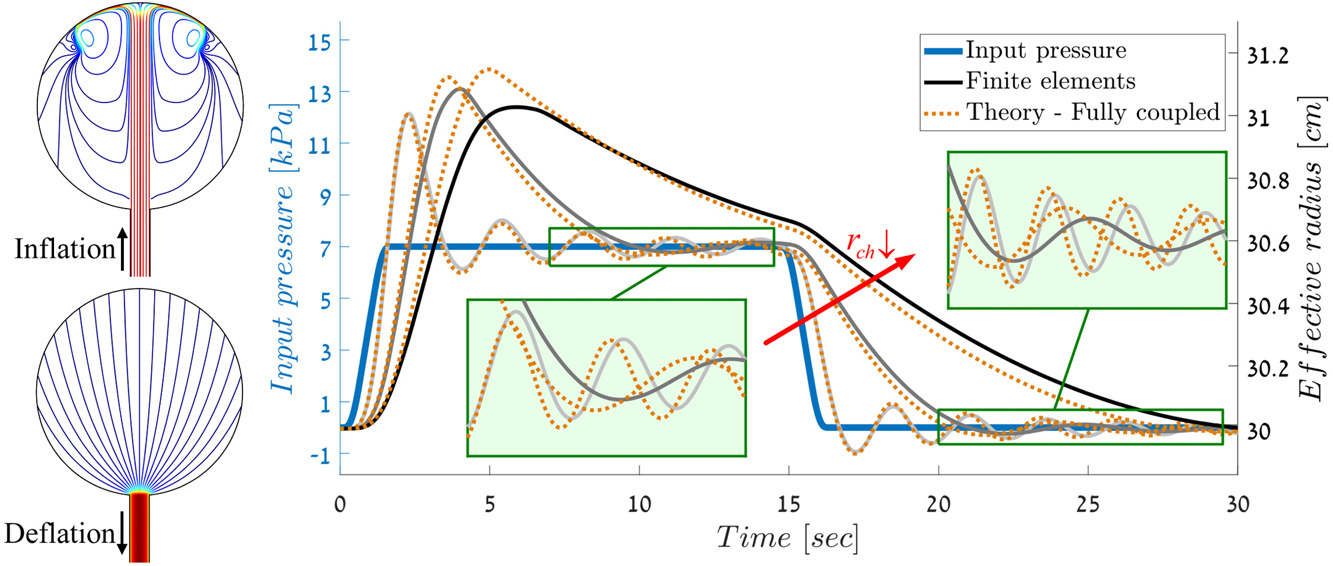
On the inflation and deflation dynamics of liquid-filled, hyperelastic balloons
Ilssar D, & Gat A.D. (2020)
Journal of Fluids and Structures 94, 102936, (pdf, Link to Journal)
| We derive a reduced-order model describing the inflation and deflation dynamics of a liquid-filled hyperelastic balloon, focusing on inviscid laminar flow and the extensional motion of the balloon. We initially study the flow and pressure fields for dictated motion of the solid, which throughout deflation are obtained by solving the potential problem. However, during inflation, flow separation creates a jet within the balloon, requiring a different approach. The analyses of both flow regimes lead to a simple piecewise model, describing the fluidic pressure during inflation and deflation, which is verified by finite element computations. We then use a variational approach to derive the equation describing the interaction between the extensional mode of the balloon and the entrapped fluid, yielding a nonlinear hybrid oscillator equation. Analytical and graphical investigations of the suggested model are presented, shedding light on its static and dynamic behaviour under different operating conditions. Our simplified model and its underlying assumptions are verified utilizing a fully coupled finite element scheme, showing excellent agreement. |
.  |